资讯
体育游戏app平台既能生谚语义分割、也能酿成几何一致的新视角图像-开云「中国」kaiyun网页版登录入口
芝能科技出品
在2025年ICCV计较机视觉大会上,特斯拉自动驾驶副总裁阿肖克·埃鲁斯瓦米三年来初次公开了FSD的本领架构。
从曝光的PPT中不错看到,特斯拉FSD已演化为多模态大模子系统,输入包括视频、导航、车体情景与声息,输出则涵盖3D占用收罗、3D高斯重建、谈话决策和划定领导。
特斯拉或已遴选VLA(Vision-Language-Action)体式的模子体系,将谈话推理引入自动驾驶闭环中。
结合FSD V14系列软件的快速迭代与功能说明,不错看到特斯拉正借助更大限度的模子、更强算力平台与好意思满闭环仿真体系,迈向自动驾驶的“通用智能”阶段。
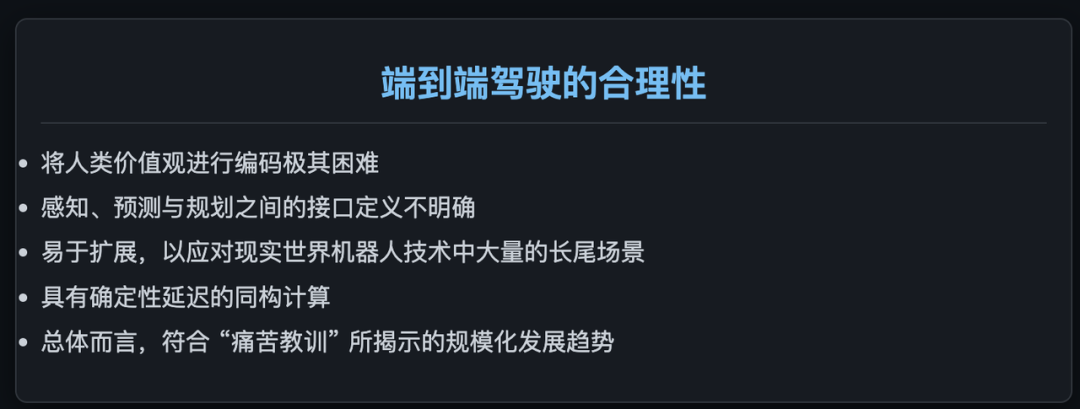
01FSD的架构,多模态模子自V12版块起,特斯拉FSD已绝对转向端到端神经收罗架构“Photon In,Control Out”,从录像头像素输入到车辆划定输出的全过程由单一收罗完成。
不同于传统“感知—贪图—划定”的模块化系统,端到端架构取消了东谈主工设定的接口层,使模子梯度能领路扫数历程,已矣感知与决策的合股优化。
V12之后,FSD在谈路说明上仍是显耀拟东谈主化,而V14的本领曝光标明,这一体系正在进一步演化为包含谈话知晓和生成材干的多模态智能体。
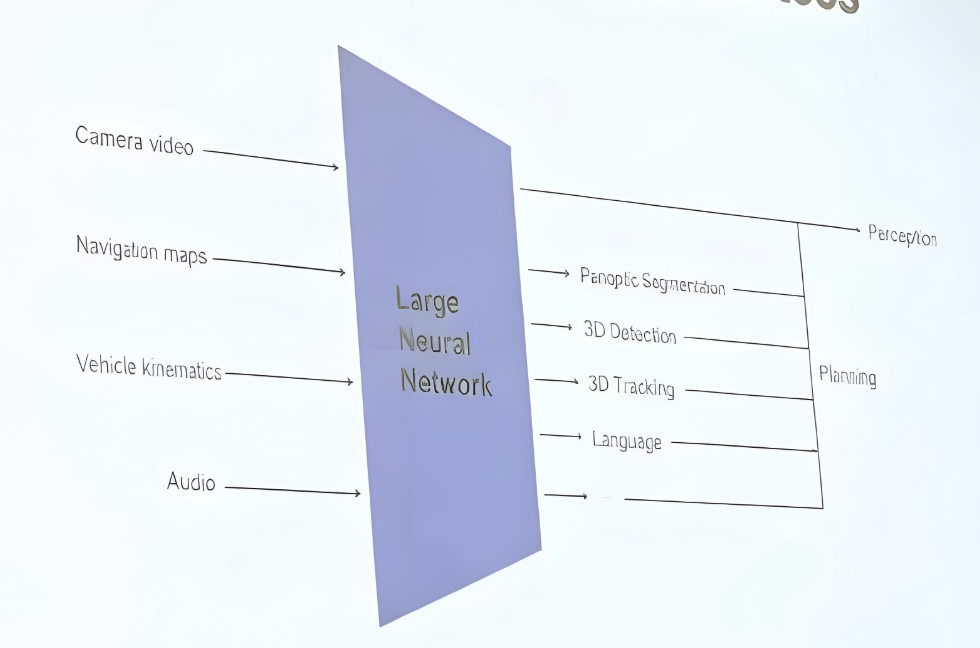
从ICCV流出的幻灯片不错看到,特斯拉的FSD中枢收罗输入包括七路高诀别率录像头视频、车辆本身畅通讯息、导航与音频信号。
输出则包含语义分割、占用网格、3D高斯特征、谈话抒发以及最终的划定动作,FSD或已接入视觉-谈话-动作(VLA)框架,使模子具备“讲明”与“想考”的材干。
端到端系统在骨子上惩处了模块化系统中的“接口瓶颈”。
在传统有缠绵中,感知撤消以鸿沟框或线段的体式传递,摈弃了信息的抒发材干。现实驾驶中的复杂物体,如动物、飘舞的塑料袋或已而出现的隔断物,其步履难以通过有限标签形容。
端到端模子奏凯从像素到动作映射,神经收罗里面可自动学习出语义与步履的高维对应关系。Ashok展示的案例中,FSD在冒昧动物穿越谈路时能当然延缓遁入。
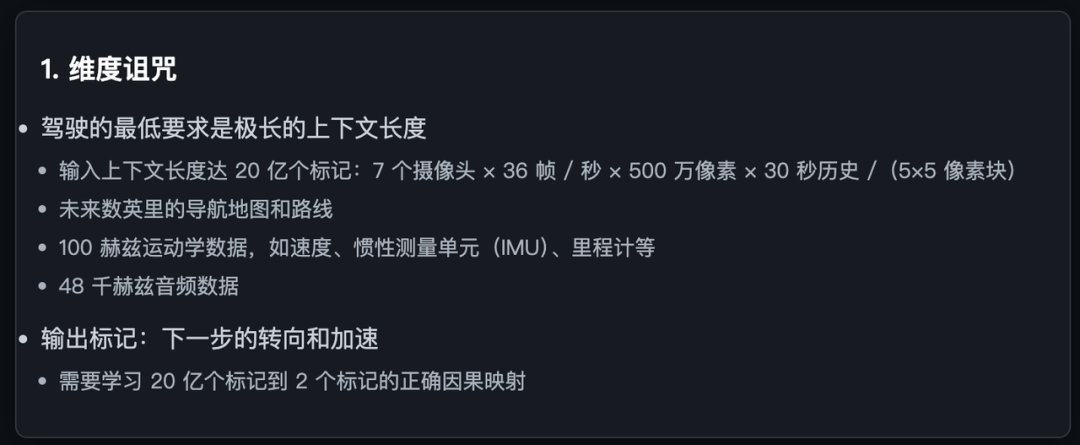
但端到端带来的最大挑战是维度是曲。
以特斯拉的数据流为例,畴昔30秒内36Hz帧率的多录像头视频、导航和车速IMU信号重叠后,输入维度绝顶于数十亿token,而输出仅为两个划定领导。
如安在高维输入与低维输出之间开导褂讪的映射,是端到端模子的中枢贫窭。
特斯拉通过内行车队数据和渊博的数据引擎冒昧此问题。每辆车王人在抓续回传长尾场景数据,系统会自动捕捉荒谬继承、展望偏差或突发隔断物,从而得回极为丰富的荒谬样本,让FSD的老师数据不再局限于旧例谈路,而袒护极点和生僻的真实环境,使模子得回抓续演化的材干。
特斯拉在V14阶段引入了谈话与3D重建行为中间监督信号。
谈话的引入使系统能进行逻辑推理。举例在施工厂景中,FSD不仅识别“Road Closed”标记,还能结合高下文推理出“左侧绕行”,完成类东谈主判断。
谈话不单是信息输出,更是模子里面的一种“慢系统想考”,通过语义链(Chain-of-Thought)对决策进行校验,提高了端到端系统的可讲明性。
比拟之下,3D高斯重建本领提供了空间知晓材干。3D Gaussian通过一系列高斯椭球体形容场景,可已矣高效可微的重建与渲染,既能生谚语义分割、也能酿成几何一致的新视角图像,为端到端老师提供密集监督信号,让模子在感知空间中领有肖似东谈主类的三维直观,而非只是依赖二维像素。
刻下特斯拉的FSD架构已矣多层剖析的合股:视觉捕捉事实,谈话推理因果,动作生成撤消。
02评测体系与安全考证端到端系统的老师贫窭并非一齐在数据层面,更关节的是何如评估与考证。
Ashok在演讲中强调,传统的老师亏蚀函数(Loss)无法代表自动驾驶性能。原因在于,自动驾驶存在多种可接受步履旅途——在解除情境下,驾驶员可能遴荐延缓、绕行或泊车,三者王人合理,因此单一缺欠度量无法反馈模子的真实材干。
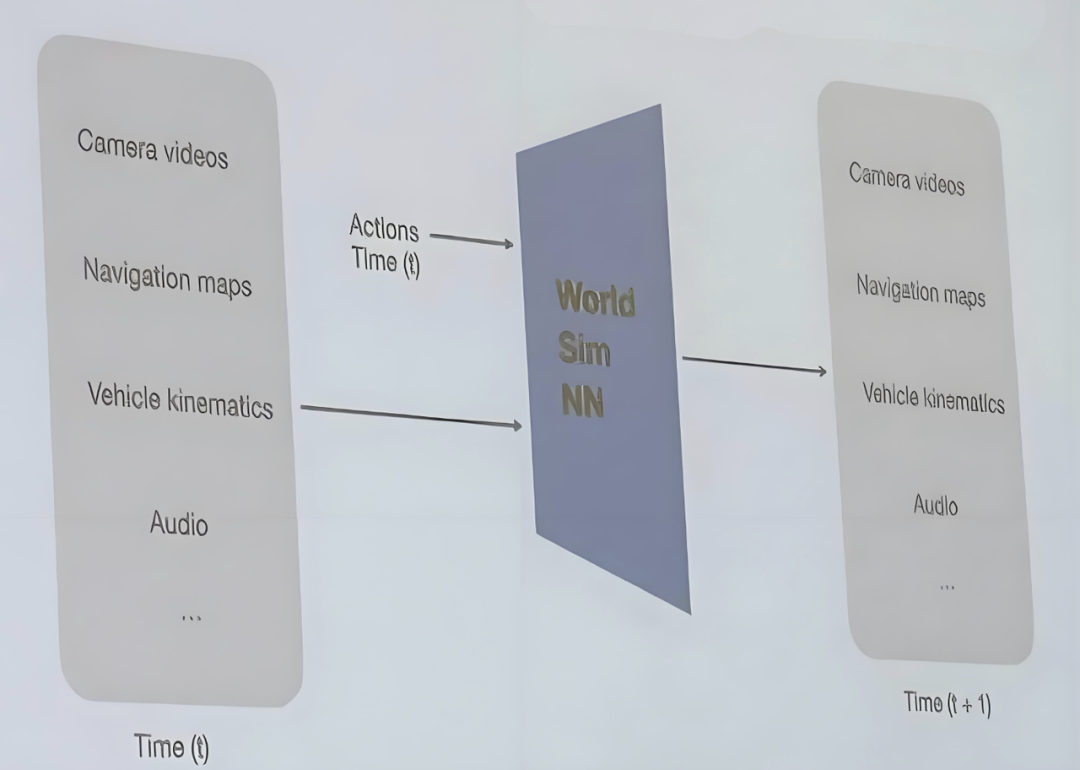
特斯拉开导了基于神经收罗的闭环仿真系统,让模子在诬捏环境中资格好意思满驾驶过程,通过与东谈主类真值对比评估说明。
闭环仿真不仅用于考证正确性,更是模子迭代的紧迫技能。
特斯拉可在仿真中自动生成顽抗场景,举例筹商隔断物位置、修改交通讯号、加入突发情况,以测试模子褂讪性,依赖于特斯拉的3D高斯场景生成系统,从真实视频中快速重建城市街景,并进行语义裁剪。
通过反复的诬捏驾驶测试,系统简略发现端到端收罗在特定要求下的薄缺点,并将相干数据回流至老师集,已矣自我强化。
特斯拉在自动驾驶的研发口头上已酿成“数据-模子-考证”的闭环生态,车辆生成数据→模子学习→仿真考证→撤消反馈→再老师,渊博的系统不是依靠更多章程,而是依靠评测体系的褂讪性与反馈效果,可在每次模子迭代后快速得回闭环性能方向,已矣了近乎联接的优化轮回。
特斯拉神经收罗结构在推理阶段的延时是固定的,即使场景复杂,也能保抓一致的响应周期。这种细目性关于自动驾驶划定尤为紧迫,它保证了车辆在毫秒级时序下的可展望性。
结合FSD自研芯片的高算力平台,特斯拉得以在更短时辰内启动更大的模子,已矣更高频的感知-划定轮回。
在安全层面,特斯拉FSD的“可讲明中间层”提供了监管和考证的基础。
系统在输出划定动作前,会同期生成占用网格、语义图、谈话推理撤消等多模态信号,这些中间撤消不仅可用于车机可视化,也便于开发者与监管机构审查决策逻辑。
这种结构使端到端模子具备要求可讲明性:若车辆在某场景中决策荒谬,可通过谈话推理链与视觉占用撤消回溯模子的“想考旅途”,评估其是否合理。
特斯拉在AI安全上的政策转向,是通过“盛开系统的抓续考证”来确保安全。
通过谈话链路与概率推理,FSD具备了对本身步履进行逻辑考验的材干,每一步动作王人不是盲主义撤消,而是可追忆的决策过程。这种理念在骨子上接近东谈主工智能领域所扣问的“天下模子”想维:AI不仅要推行任务,还要知晓天下。
FSD V14版块新的算法在无保护转弯、加塞遁入、特种车识别等细节上更像东谈主类驾驶员,以致能识别树枝、轮胎等微小隔断物并主动遁入。
FSD还初次结合导航进行及时旅途重贪图,支撑堵车绕行和极度泊车偏好配置,模子具备语义知晓与空间推理材干,模子在复杂城市夜间环境中可已矣高动态、多方向的畅达决策,代表着FSD在步履生成层面插足“个性化智能”阶段。
小结特斯拉FSD V14将谈话、视觉、空间与划定合股在一个多模态大模子中体育游戏app平台,使系统具备知晓、推理和行径的材干,正在用推行居品考证大模子在机器东谈主领域的可行旅途。